Automotive Ethernet technologies
Ethernet alone is not suitable for automotive, so introducing Ethernet in an automotive environment poses a number of unique challenges especially related to the physical layer.
Compared to other industries, the automotive environment has particular challenges in terms of cost and environmental conditions – like temperature, mechanical stress, electromagnetic compatibility (EMC), and reach. To meet these challenges, a family of new Ethernet versions has been standardized covering the entire range of speeds relevant to automotive communication. These versions represent strongly simplified and robust technologies, and they have, in turn, been introduced into other industries where the robustness and / or the cost position of these technologies provides an advantage.
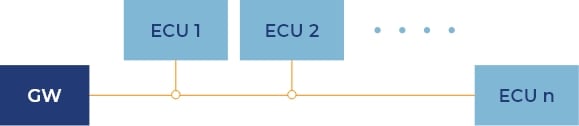
- 100BASE-T1 - uses single unshielded twisted pair cables with a maximum length of 15 meters. The bridge, composed of 4 resistors, separates, transmits, and receives directions on each side of the link.
- 1000BASE-T1 - with the emergence of connected and autonomous vehicles and more sophisticated infotainment systems, the information exchanged within a vehicle has grown rapidly. 100BASE-T1 has been introduced as the definition of a Gigabit Ethernet technology for automotive use.
- 1000BASE-RH - uses Polymeric Optical Fiber (POF). POF is immune to any EMC problem, and it also provides galvanic isolation.
- 10BASE-T1S - a low-speed, low-cost Ethernet solution for I applications that only need very low bitrates for communication.
- MultiGBASE-T1 - a set of new PHYs with 2.5, 5 and 10 Gbps supported over Shielded Twisted Single Pairs (STSP) to support high bitrate and external communication for AI evaluation.
PoDL
The wiring harness is a significant cost and weight factor in vehicles. Being able to cut down the number of wires in the harness will reduce costs and more importantly, reduce weight. Therefore, it is highly advantageous to be able to use data cables to supply power to ECUs without a separate power supply network.
In Ethernet versions for office or home use, Power over Ethernet (PoE) has been available for many years, providing power to devices like wireless access points or IP phones, where the provision of dedicated power supplies would be inconvenient if not impossible.
Using power over the automotive Ethernet versions with twisted single pair cables is comparatively straightforward. PoDL has been standardized by IEEE as 802.3bu.
MACsec
MACsec is a security standard defined by IEEE as 802.1AE. It operates at the medium access control layer and defines connectionless data confidentiality and integrity for media access independent protocols. The MACsec frame format is similar to the Ethernet frame format. It includes a security tag which is an extension of the EtherType and a Message Identification Code which is used to authenticate a message.
Audio Video Bridging (AVB)
AVB and TSN are the two key IEEE standards to enable reliable real-time data transfer for Automotive Ethernet applications. This type of Ethernet gives engineers the tools to design automotive networks with predictable latency and guaranteed bandwidth. TSN hardware support enables robust, low-latency and deterministic synchronized packet transmission to meet the ISO 26262 requirements of safety-critical control systems like braking or steering.
Diagnostics Over Internet Protocol (DoIP)
Diagnostics over IP enables much higher data rates than CAN, creating large potential savings both in terms of time and expenses when complex diagnostic tasks and flash applications are needed. Ethernet-based communication allows new concepts in vehicle diagnostics, for example direct vehicle access from the tester, and considerably simplified integration of the diagnostic interface into the IT infrastructure.
Higher layer Protocols
With the adoption of Ethernet the automotive industry has also embraced IP for the Network Layer and TCP and UDP for the transport layer, as well as some other standard protocols. Below is a chart providing the Protocol overview for Automotive Ethernet.
| Audio / video transport |
Time sync |
Automotive NM |
Diagnosis and flashing |
Control comm. |
Service discovery |
Address config. |
Address resolution, signaling, etc. |
| IEEE 1722 (AVB) |
IEEE 802.1AS (AVB) |
UDP-NM |
DoIP |
SOME / IP |
SOME / IP-SD |
DHCP |
ICMP |
ARP |
|
| UDP |
TCP and / or UDP |
UDP |
| IP |
| Ethernet MAC / IEEE DLL, 802.1Qx, VLANs |
| Ethernet PHY |