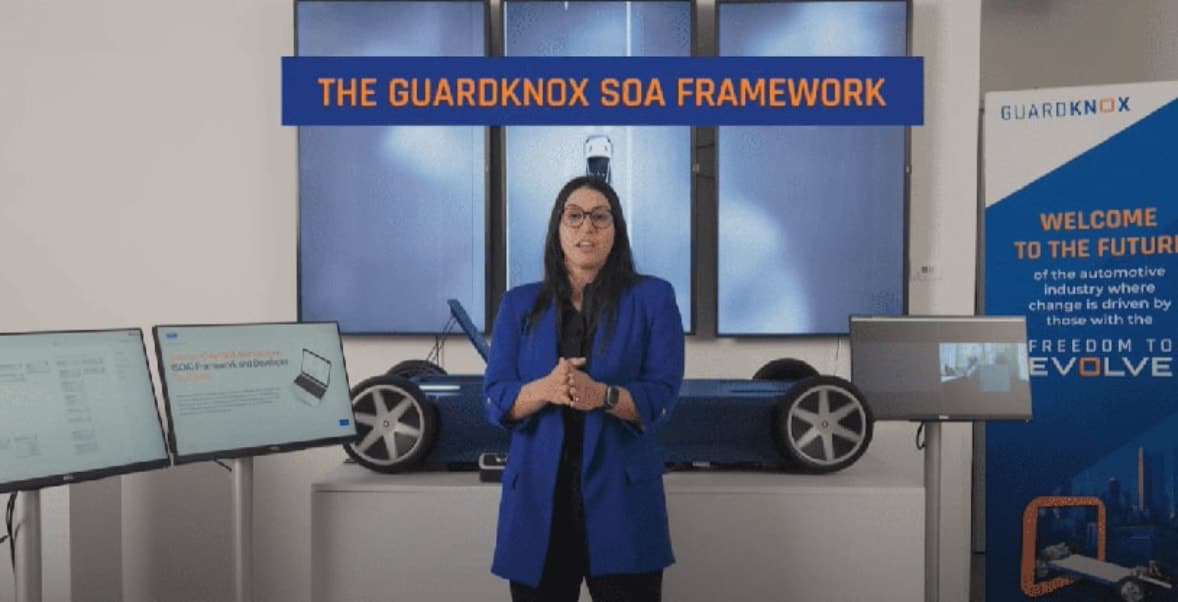
SERVICE-ORIENTED ARCHITECTURE DEPLOYMENT EXAMPLE
Below is an example of a generic framework using GuardKnox’s SOA approach deployed on a domain with 2 ECUs. (1 central computer & 1 gateway controller, 2 gateways controller, 1 gateway controller & 1 ECU, etc.)
On top of the hardware there is the Secure Separation Kernel (SSK). A separation kernel is a SW layer which creates an environment that is indistinguishable from that provided by a physically distributed system. The secure separation kernel adds sophisticated security functions to the separation functions.
On top of the SSK is the hypervisor that creates a Virtual Machine (VM) environment. For this purpose it emulates a HW platform on which multiple guest partitions with their respective Operating Systems (OSs) can run. This means that for a Guest OS it is indistinguishable whether it runs on top of a hypervisor or directly on top of a processor HW.
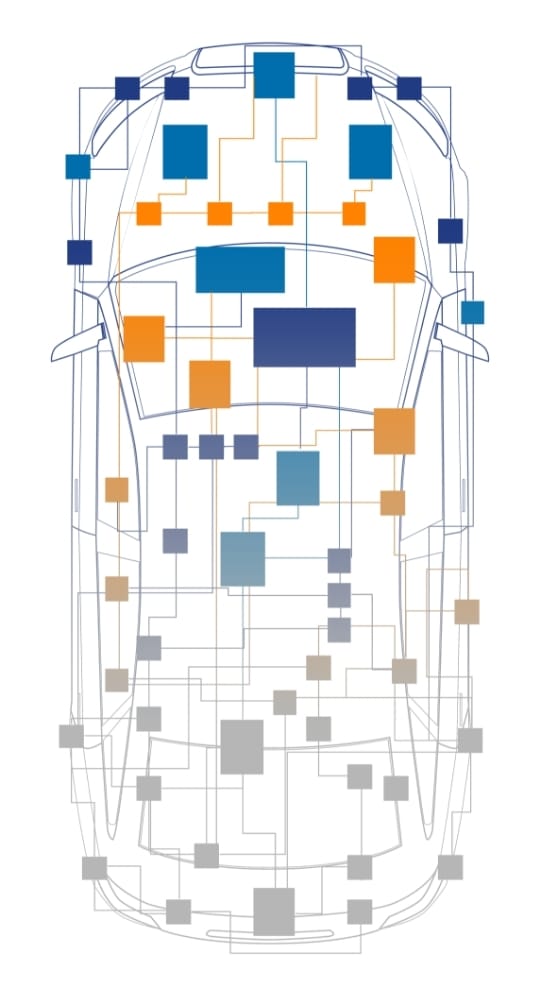
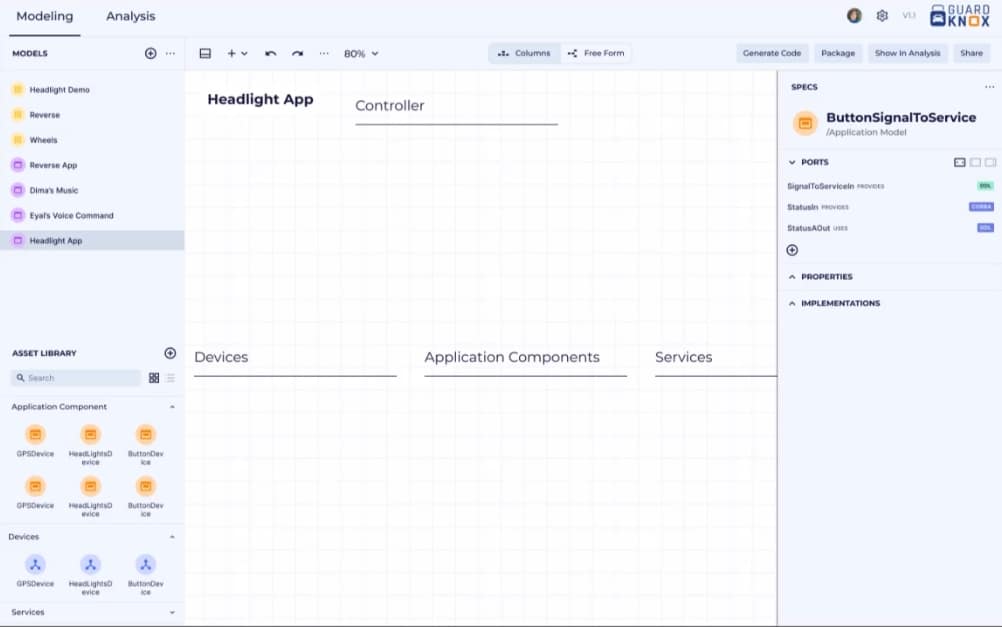
On top of each Guest OS and the common functions SOA Node Manager and SOA Port there are one or several applications that have been developed for this particular OS. The applications, common functions and their OS form a node. One particular node is the Central Management node which manages the entire GuardKnox SOA Framework.
AUTOSAR Adaptive has increasingly been adopted for SW development in the automotive industry. A number of applications have been implemented already and are available to be (re-)used. GuardKnox’s SOA Framework, however, is more powerful and provides a much more comprehensive approach to the entire SW lifecycle. Instead of having to re-implement the existing AUTOSAR Adaptive applications, they are directly supported within GuardKnox’s SOA Framework. They run on dedicated nodes, with their own specific OS. The SOA Node Manager ensures that AUTOSAR Adaptive messages are properly routed within the system.

A SWC can be manually and automatically relocated, by the SOA Framework, into a compatible node or even another compute platform whether on-vehicle or in the cloud. When the source was compiled using a supported compiler for a compatible OS, it can be seamlessly shifted to a different partition. Otherwise, a POSIX-compliant SWC can be built and activated on top of any OS and hypervisor which is POSIX compliant.
GuardKnox’s SOA Framework is even powerful enough to shift node containing an OS and applications between ECUs and even between compatible hypervisors.
Access to the virtualized communication infrastructure is seamlessly mediated through the SOA Framework, allowing for virtualized Remote Procedure Call (RPC) and data exchange.