AUTOMOTIVE ETHERNET TECHNOLOGIEN
Ethernet allein ist für die Automobilindustrie nicht geeignet. Daher stellt die Einführung von Ethernet im automobilen Umfeld eine Reihe einzigartiger Herausforderungen dar, insbesondere in Bezug auf die physikalische Schicht.
Im Vergleich zu anderen Branchen gibt es im Automobilbereich besondere Herausforderungen in Bezug auf Kosten und Umgebungsbedingungen – wie Temperatur, mechanische Belastung, elektromagnetische Verträglichkeit (EMV) und Reichweite. Um diese Herausforderungen zu meistern, wurde eine Familie neuer Ethernet-Versionen standardisiert, die den gesamten für die Automobilkommunikation relevanten Geschwindigkeitsbereich abdecken. Diese Versionen stellen stark vereinfachte und robuste Technologien dar, die ihrerseits in anderen Branchen eingeführt wurden, in denen die Robustheit und/oder die Kostenposition dieser Technologien einen Vorteil darstellen.
- 100BASE-T1 - verwendet einzelne ungeschirmte Twisted-Pair-Kabel mit einer maximalen Länge von 15 Metern. Die Brücke, die aus 4 Widerständen besteht, trennt, sendet und empfängt Richtungen auf jeder Seite der Verbindung.
- 1000BASE-T1 - Mit dem Aufkommen von vernetzten und autonomen Fahrzeugen und immer ausgefeilteren Infotainment-Systemen hat der Informationsaustausch innerhalb eines Fahrzeugs rapide zugenommen. 100BASE-T1 wurde als Definition einer Gigabit-Ethernet-Technologie für den Einsatz in Fahrzeugen eingeführt.
- 1000BASE-RH - verwendet Polymeric Optical Fiber (POF). POF ist immun gegen EMV-Probleme und bietet außerdem eine galvanische Isolierung.
- 10BASE-T1S - eine kostengünstige Low-Speed-Ethernet-Lösung für I-Anwendungen, die nur sehr niedrige Bitraten für die Kommunikation benötigen.
- MultiGBASE-T1 - eine Reihe neuer PHYs mit 2.5, 5 und 10 Gbit/s, die über Shielded Twisted Single Pairs (STSP) unterstützt werden, um hohe Bitraten und externe Kommunikation für KI-Auswertungen zu ermöglichen.
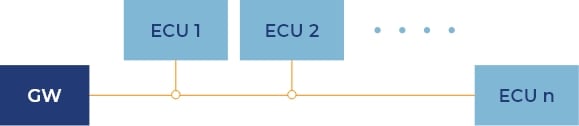
PoDL
Der Kabelbaum ist ein bedeutender Kosten- und Gewichtsfaktor in Fahrzeugen. Wenn die Anzahl der Kabel im Kabelbaum reduziert werden kann, sinken die Kosten und, was noch wichtiger ist, das Gewicht. Deshalb ist es sehr vorteilhaft, Datenkabel zur Stromversorgung von Steuergeräten ohne separates Stromversorgungsnetz verwenden zu können.
Bei Ethernet-Versionen für den Büro- oder Heimgebrauch ist Power over Ethernet (PoE) seit vielen Jahren verfügbar und versorgt Geräte wie drahtlose Zugangspunkte oder IP-Telefone mit Strom, bei denen die Bereitstellung dedizierter Stromversorgungen unpraktisch oder sogar unmöglich wäre.
Die Verwendung von Strom über die Automotive Ethernet-Versionen mit Twisted-Single-Pair-Kabeln ist vergleichsweise einfach. PoDL wurde von der IEEE als 802.3bu standardisiert.
MACsec
MACsec ist ein Sicherheitsstandard, der von IEEE als 802.1AE definiert wurde. Er arbeitet auf der Medium-Access-Control-Schicht und definiert verbindungslose Datenvertraulichkeit und -integrität für medienzugriffsunabhängige Protokolle. Das MACsec-Rahmenformat ist dem Ethernet-Rahmenformat ähnlich. Es enthält ein Sicherheitskennzeichen, das eine Erweiterung des EtherType ist, und einen Message Identification Code, der zur Authentifizierung einer Nachricht verwendet wird.
Audio Video Bridging (AVB)
AVB und TSN sind die beiden wichtigsten IEEE-Standards, die eine zuverlässige Echtzeit-Datenübertragung für Automotive Ethernet Anwendungen ermöglichen. Diese Art von Ethernet gibt Ingenieuren die Werkzeuge an die Hand, um Automotive-Netzwerke mit vorhersehbaren Latenzen und garantierter Bandbreite zu entwickeln. Die TSN-Hardwareunterstützung ermöglicht eine robuste, latenzarme und deterministisch synchronisierte Paketübertragung, um die Anforderungen der ISO 26262 für sicherheitskritische Steuerungssysteme wie Bremsen oder Lenkung zu erfüllen.
Diagnostics Over Internet Protocol (DoIP)
Diagnostics over IP ermöglicht wesentlich höhere Datenraten als CAN, was bei komplexen Diagnoseaufgaben und Flash-Applikationen ein großes Zeit- und Kosteneinsparungspotenzial mit sich bringt. Die Ethernet-basierte Kommunikation ermöglicht neue Konzepte in der Fahrzeugdiagnose, z. B. den direkten Fahrzeugzugriff vom Tester aus, und eine deutlich vereinfachte Integration der Diagnoseschnittstelle in die IT-Infrastruktur.
Higher layer Protocols
Mit der Einführung von Ethernet hat die Automobilindustrie auch IP für die Netzwerkschicht und TCP und UDP für die Transportschicht sowie einige andere Standardprotokolle übernommen. Nachstehend finden Sie eine Übersicht über die Protokolle für Automotive Ethernet.
| Audio / video transport |
Time sync |
Automotive NM |
Diagnosis and flashing |
Control comm. |
Service discovery |
Address config. |
Address resolution, signaling, etc. |
| IEEE 1722 (AVB) |
IEEE 802.1AS (AVB) |
UDP-NM |
DoIP |
SOME / IP |
SOME / IP-SD |
DHCP |
ICMP |
ARP |
|
| UDP |
TCP and / or UDP |
UDP |
| IP |
| Ethernet MAC / IEEE DLL, 802.1Qx, VLANs |
| Ethernet PHY |